This project includes design, develop, kinematics and dynamics analysis of a 3-DOF Cartesian robot inspired by the AgileEye2 parallel robot. I designed and developed the robot and was a key member to analyze its kinematics and dynamics using the Euler-Lagrangian method and control the robot using computed-torque control method. The key characteristic of this robot is to provide fast spherical motion similar to the human eye so we tested it with visual tracking and visual servoing applications and also used it as a camera stabilizer.

Cheshm-e-Chabok 2-DOF parallel robot.

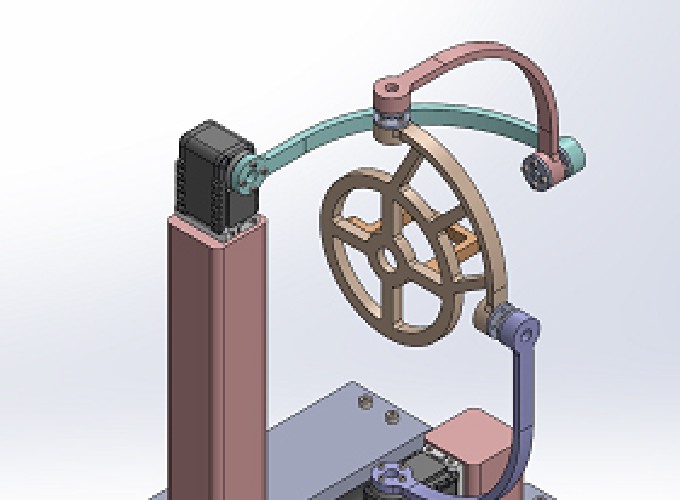
CAD model of Cheshm-e-Chabok 2-DOF parallel robot.

