Biography
I am a Ph.D. candidate at the Utah Robotics Center, University of Utah. I do my research under supervisory of Prof. Tucker Hermans and Prof. Andrew Merryweather and I am affiliated with Utah Learning Lab for Manipulation Autonomy (LL4MA Lab) and Laboratory of Ergonomics and Safety.
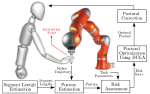
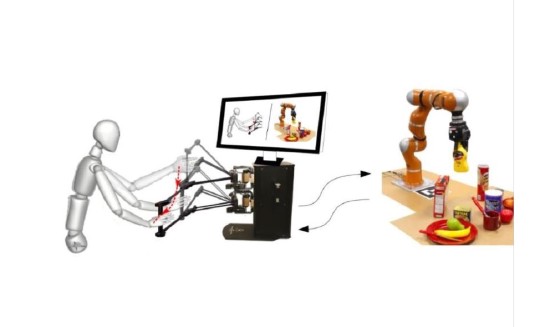
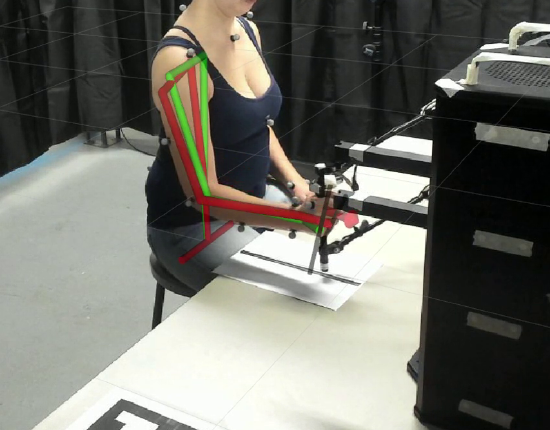
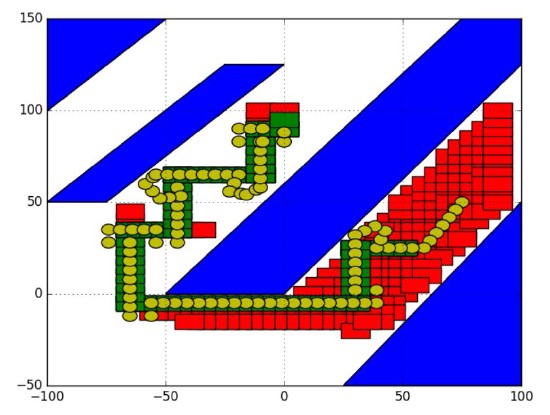
My current research includes “probabilistic perception and planning” in HRI and covers human state estimation, intelligent postural optimization, and risk-aware motion & manipulation planning. I am passionate about using probabilistic modeling and HRI concepts in interactie behaviour prediction and planning for autonomos vehicles and intelligent robots.
Recently, I was selected as one of the HRI Pioneers 2021 cohorts, a highly competitive doctoral workshop at the top venue for HRI research, and I am the co-chair of HRI Pioneers 2022.
I expect to graduate April 2022. Feel free to contact me if you would like to discuss future job opportunities.
Email: amir.yazdani@utah.edu
Interests
- Probabilistic Robotics
- Behaviour Planning
- Risk-Aware Motion Planning
- Human-Robot Interaction
- Mixture of model-based and model-free RL
- Human Posture Estimation, Prediction, and Optimization
- Autonomous Systems
Education
-
PhD in Mechanical Eng.-Robotics, 2022
University of Utah
-
MSc in Mechanical Eng., 2015
AmirKabir University of Technology
-
BSc in Mechanical Eng., 2010
Khajeh Nasir Toosi University of Technology