Posture estimation
Posture Estimation and Optimization in Ergonomically Intelligent Teleoperation Systems
Abstract
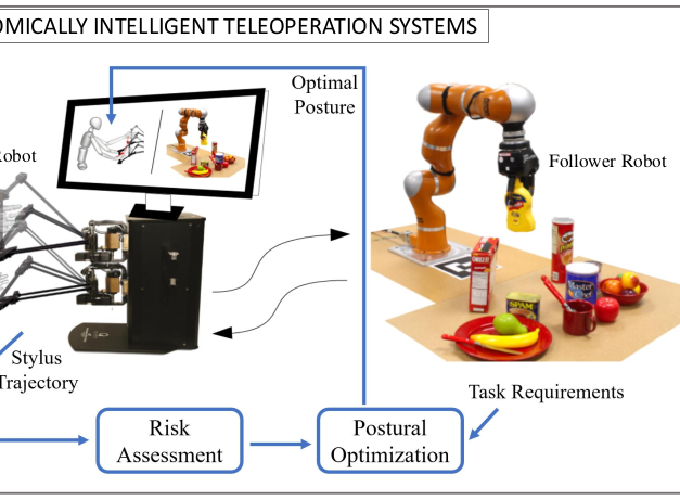
Ergonomics and human comfort are essential concerns in physical human-robot interaction (p-HRI) applications such as teleoperation. We introduce a novel framework for posture estimation and optimization for ergonomically intelligent teleoperation systems that estimates the human operator’s posture solely from the leader robot’s trajectory and provides online postural correction and offline initial posture correction according to the type of teleoperation task. Although our framework is in teleoperation, it can be extended to other p-HRI applications with minimal modifications.
Type
Publication
In Companion of HRI 2021
Date
March, 2021
