This project includes design, develop, kinematics and dynamics analysis of a 3-DOF Cartesian robot inspired by the Tripteron robot. I optimally designed the mechanism to maximize the singularity-free workspace using geometry approaches using SolidWorks considering all joint limits and mechanical interface of joints. Later, I was involved with the optimal collision-free path planning of this robot. The accuracy and working speed due to its parallel structure, features this robot to be used for material handling, fast pick and place tasks, and large-scale 3D printing.
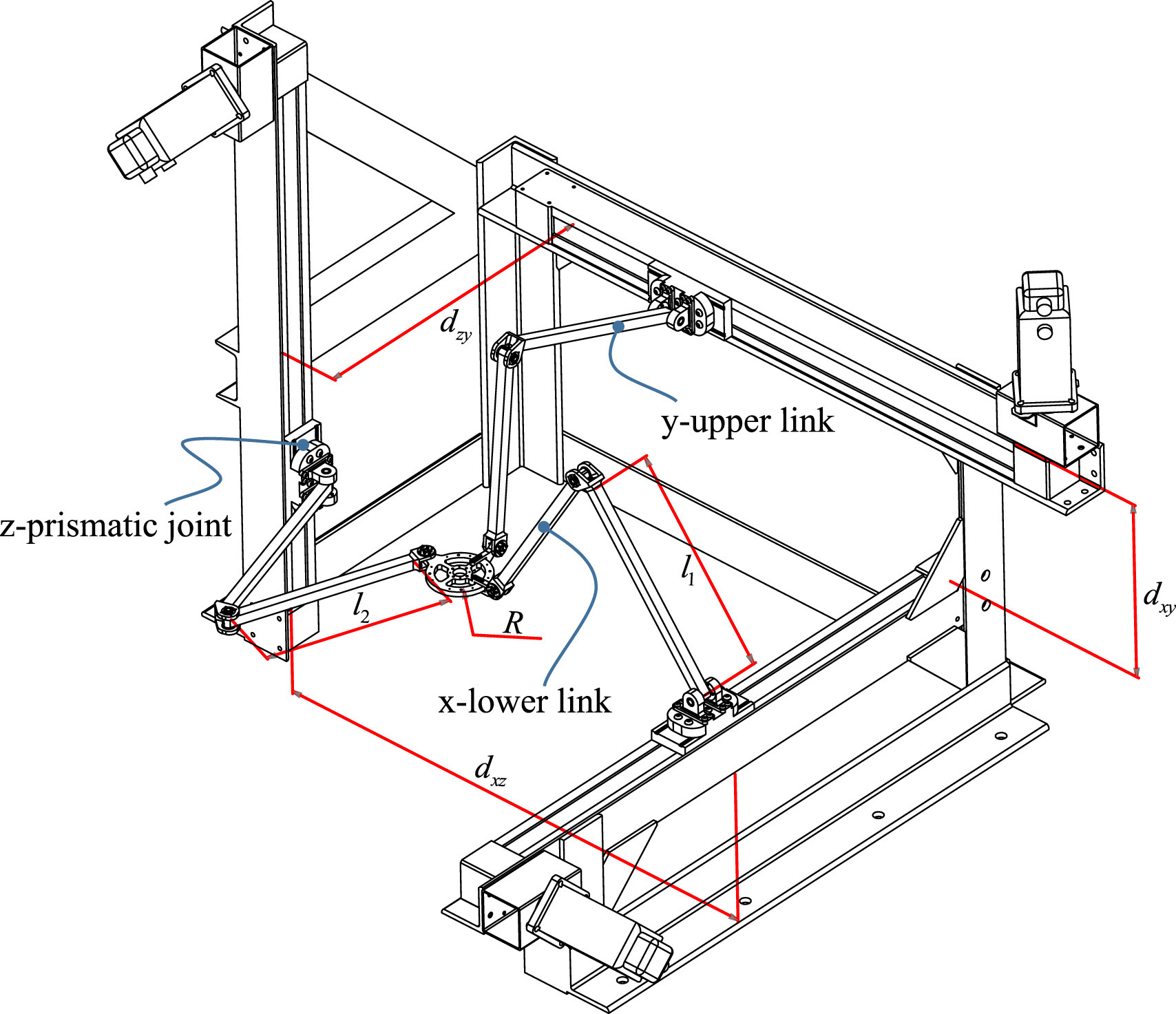
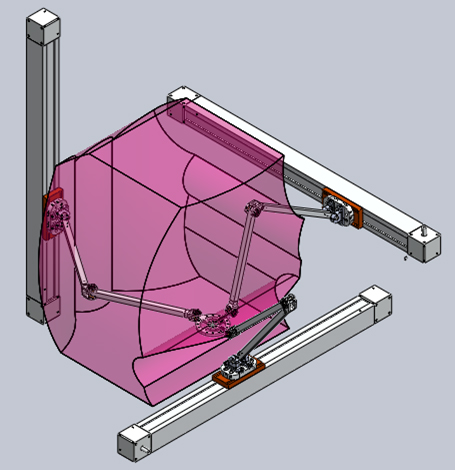
CAD model of the 3-DOF decoupled parallel robot.