This project includes design, and develop a pneumatic 6-DOF Gough-Stewart parallel robot.
In which, I did the kinematic design and optimized the design as a small testbed for driving and aircraft simulators. The design of the mechanism based on the characteristics of pneumatic actuators made it a very challenging design.
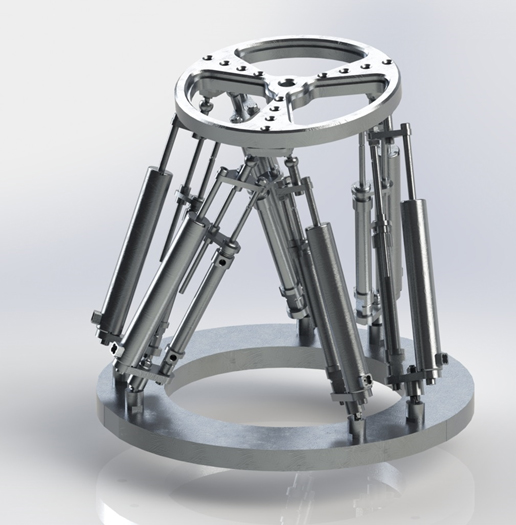
CAD model of the pneumatic 6-DOF Gough-Stewart parallel robot.
The pneumatic Gauph-Stewart parallel robot
A Pneumatic 6-DOF Gough-Stewart Robot
 The pneumatic Gauph-Stewart parallel robot
The pneumatic Gauph-Stewart parallel robot
A Pneumatic 6-DOF Gough-Stewart Robot
