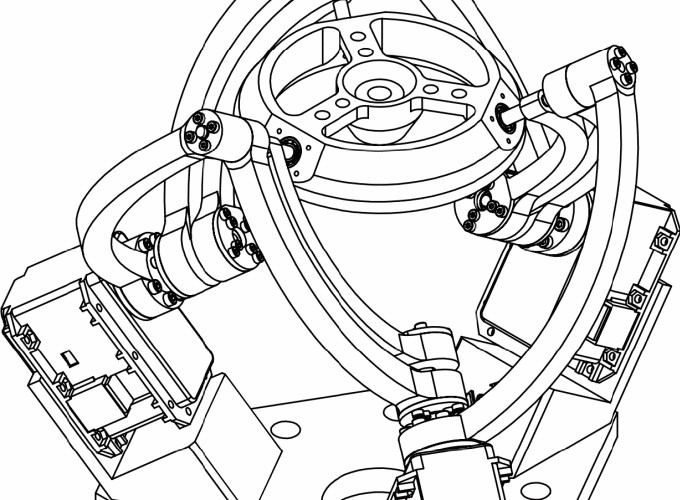
This project includes design, kinematics and dynamics analysis of a 3-DOF Cartesian robot inspired by the AgileEye3 parallel robot. I designed the robot and was the key member to do the kinematics and dynamics analysis using the Euler-Lagrangian method and also control of the device using computed-torque control method. This robot also provides fast 3-DOF spherical motion. We used this robot for tracking and also for simulating the motion of a human neck for a human head-like robot.