Dynamic Modeling and Computed Torque Control of a 3-DOF Spherical Parallel Manipulator
Abstract
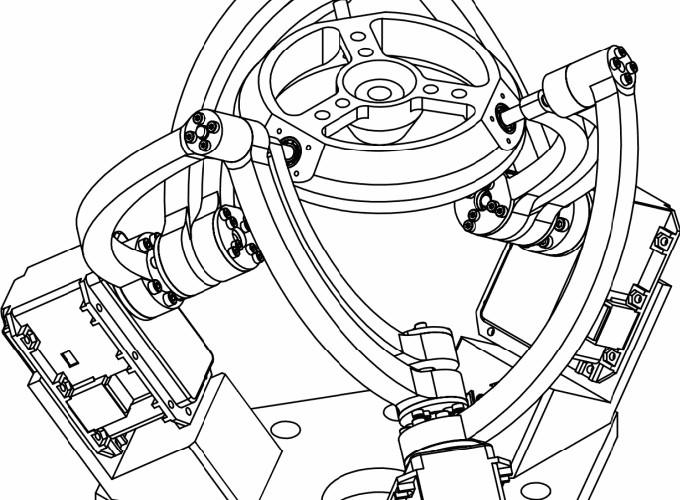
This paper investigates the dynamic modeling of a 3-degree-of-freedom spherical parallel manipulator, called the Agile Eye, first build at Laval University. The approach used in this paper is based on detaching the manipulator into several subsystems and applying a consecutive synergy between kinematic analysis, Lagrangian and Newtonian approaches. In this regard, the manipulator under study is detached to four subsystems. After writing down the kinematic equations of all the three subsystems, the Lagrangian and Newtonian approaches are blended and finally the dynamic model of the 3-DOF Agile Eye is obtained. Finally, the problem leads to a system of 12 equations and 18 unknowns, which has been simplified to have a fully constraint system of equations. The results are put into contrast by the one obtained with a analyser software, MD-Adams. Then a co-simulation between MATLAB and MD-Adams has been accomplished in order to control the Agile Eye with computed torque control method. The latter method has led to the end-effector (EE) to follow the desired trajectory perfectly.