Ergonomically Intelligent Physical Human-Robot Interaction: Postural Estimation, Assessment, and Optimization
Abstract
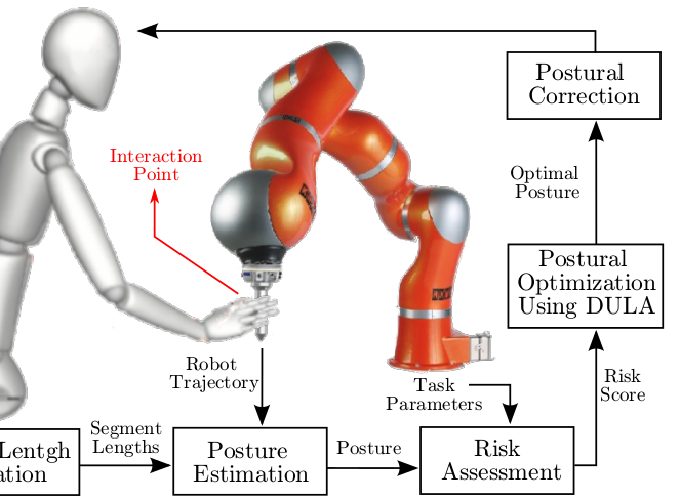
Ergonomics and human comfort are essential concerns in physical human-robot interaction applications, and common practical methods either fail in estimating the correct posture due to occlusion or suffer from less accurate ergonomics models in their postural optimization methods. Instead, we propose a novel framework for posture estimation, assessment, and optimization for ergonomically intelligent physical human-robot interaction. We show that we can estimate human posture solely from the trajectory of the interacting robot. We propose DULA, a differentiable ergonomics model, and use it in gradient-free postural optimization for physical human-robot interaction tasks such as co-manipulation and teleoperation. We evaluate our framework through human and simulation experiments.
