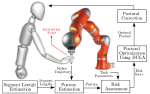
In this project, we introduce postural optimization in introduce a novel framework for postural optimization in teleoperation that benefits from common risk assessment tools in ergonomics and provides online postural correction as well as optimal initial posture correction for a teleoperator according to the type of teleoperation task. We evaluate our framework in a simulated teleoperation environment including the robots and the human.
Teleoperation setup.
Human Posture Optimization in Teleoperation
 Teleoperation setup.
Teleoperation setup.
Human Posture Optimization in Teleoperation

Amir Yazdani
PhD Candidate in Robotics
Publications
Ergonomically Intelligent Physical Human-Robot Interaction: Postural Estimation, Assessment, and Optimization
Ergonomics and human comfort are essential concerns in physical human-robot interaction applications, and common practical methods …
DULA: A Differentiable Ergonomics Model for Postural Optimization in Physical HRI?
Ergonomics and human comfort are essential concerns in physical human-robot interaction applications. Defining an accurate and …

Posture Estimation and Optimization in Ergonomically Intelligent Teleoperation Systems
Ergonomics and human comfort are essential concerns in physical human-robot interaction (p-HRI) applications such as teleoperation. We …

Talks
DULA: A Differentiable Ergonomics Model for Postural Optimization in Physical HRI
Ergonomics and human comfort are essential concerns in physical human-robot interaction applications. Defining an accurate and …


Posture Estimation and Optimization in Ergonomically Intelligent Teleoperation Systems
Ergonomics and human comfort are essential concerns in physical human-robot interaction (p-HRI) applications such as teleoperation. We …
